
We’ve reported on several kinds of maintenance and repair robots for fixing satellites, inspecting damaged nuclear reactors, climbing wind towers, and rebuilding coral reefs. Now a European consortium is working on a repair and maintenance robot system for on-site computer-numerical control (CNC) machining in dangerous or hard-to-access environments.
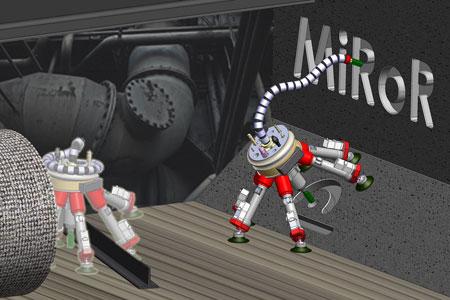
The MiRoR consortium is developing a six-legged robot with multiple modes of navigation. The consortium’s goal is to develop “Miniaturised Robotic systems for holistic in-situ Repair and maintenance works in restrained and hazardous environments.” The Miniaturised Robotic Machine (Mini-RoboMach) system would perform maintenance and repairs on large-scale sites such as industrial complexes, power plants, and oil drilling platforms. Many of these places are too dangerous for human workers or have parts that must be inspected or maintained and are inaccessible to humans because of their cramped locations.
The consortium consists of the UK’s University of Nottingham, Fraunhofer IPA (the Institute for Manufacturing Engineering and Automation) in Germany, the Spanish research firm IK4-Tekniker, the Swiss Federal Institute of Technology, Rolls-Royce, the nondestructive inspection system provider AREVA, the construction company Acciona Infrastructure, and the oil and gas exploration firm Petrom. The consortium started its work last year and plans to develop the robot by 2015.
Inspection and maintenance tasks in these facilities often call for a high degree of precision and flexibility. Two complementary systems make up the Mini-RoboMach and give it flexibility of motion. The six-legged base can move autonomously and conduct highly precise machining processes. The semi-rigid, flexible robotic arm can be used to access very small, narrow spaces.
The robot builds on the Free-leg Hexapod (FreeHex) system developed by researchers at Rolls-Royce and the University of Nottingham’s Rolls-Royce University Technology Centre in Manufacturing Technology. The six-axis parallel kinematic platform that can apply complex CNC milling processes to a variety of maintenance tasks.
The FreeHex began as a small, mobile version of a very large flexible machining tool for use in confined spaces while repairing submarines. The designers removed the fixed platform that formed the machining tool’s base, allowing the legs to move freely and the lower joints (or feet) to be positioned and attached to surfaces with a wide variety of geometries. The result was a portable CNC machine that can perform multiple functions, such as profile milling and thread milling.
According to the MiRoR website, once the Mini-RoboMach has been developed further and adapted to multiple navigation modes, the next step will be to create an intelligent controller that can “enable walk and/or snake navigations to/from work and calibration of end-effectors on required features.” The controller will pick “methods of accessing the working area while learning from these experiences.” It will plan and schedule local and global tasks and modify the robot’s behavior to protect itself in dangerous situations or conditions.
Once the controller is developed, the team will develop a virtual test bench for the Mini-RoboMach hardware and the intelligent controller software to determine the best configurations for different types of worksites. The final stage of the project will involve on-site demonstrations of repair and maintenance work.



{kind=link}